人位置計測システム「ATRacker™」
概要
人位置計測システム「ATRacker™」はLRF(Laser Lange Finder)やLiDAR(Light Detection and Ranging)を使用してエリア内のスキャンし,得られた反射の形状から人を認識し,人の位置を計測・トラッキング(追跡)するシステムです.人流に関わる潜在的な問題の見える化,機材設置やレイアウト変更,商品陳列位置をアレンジした際等の客観的・定量的な効果測定のためのデータを計測・提供します.そしてデータを活用することによる業務の効率化や事故の防止,売上げの向上や待ち時間短縮によるお客様のストレス低減等をサポートします.
HumanTrackerの使用例
以下の動画は実際のHumanTrackerの動作画面(右側)と,参考用として上方から同時に撮影した映像(左側)です.人の位置計測・トラッキングには側方に設置したLRFを使用しており,左側の映像データは使用していません.一般に多くの人流計測システムでは人が密集した場合やすれ違い,同じような色の服装の人が近くに居る場合は個別の人が認識出来なかったりトラッキング中の人が入れ替わってしまうケースが多発します.しかし本システムでは安定して追跡出来ていることが分かります.また,予め計測エリアのマップを用意する必要はありません.センサ設置後にシステム側で壁の位置を学習し,エリア内の人のみを検出してトラッキングします.
また,任意の人に固有のIDを外部から与えることも可能です.動画中ではピンクのシャツを着たスタッフにHumanAのタグをつけ,トラッキングしています.
3D LiDARの使用例
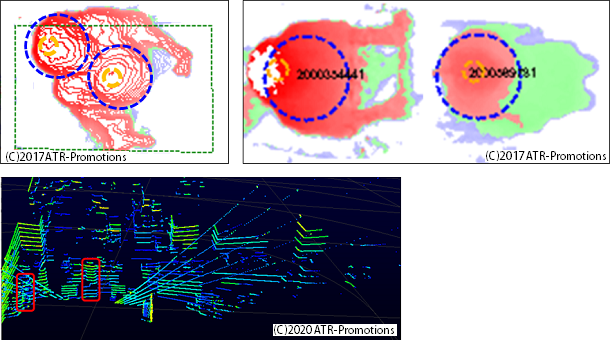
「FTPATRasche™」およびそのカスタマイズ製品では,3次元距離データが計測可能なLiDARを使用し,LRFよりも多くの情報が得られるほか,高所に設置して障害物の影響を受けにくくして広い範囲の計測を行うことが可能です.下図はLiDARで計測したデータをプログラムが分析・処理した画像です.上段左側は乳児を抱っこした大人,同右側は車椅子の要介助者と介助者がエリア内を通過した際のデータです.弊社特許技術(特許7079466等)を併用することにより共連れを含む高精度通過カウントだけでなく,一般の通過センサでは識別困難な抱っこされている乳児を認識したり,通過した車椅子に人が座っているかや介助者が居るかも検出します(公共交通機関で行った実証実験では正解率99%以上を達成).また,近年廉価になりつつある長距離計測可能なLiDAR等,複数メーカーのセンサに対応しており,お客様の目的や用途に合わせた柔軟な対応が可能です.
使用している弊社特許について:
上方に設置したLiDAR等を使用し,人の形状や頭部などを検出して高精度に人の位置を検出したり人数カウントを行う技術を使用しています.特許7079466(人属性認識システムおよびプログラム),特許7311299(人認識システムおよび人認識プログラム),特許7347960(撮影方向設定装置、撮影方向設定プログラム、撮影方向設定方法および侵入検出システムの侵入検出方法)など.
主な用途と特徴
主な用途
| 利用場所 | 主な用途 |
| アミューズメント 施設・設備 |
アトラクションに用いるリアルタイムフィードバック用高精度人位置計測 |
| 公共交通機関や サービス業窓口 |
待ち時間計測,設備や人流の最適化による待ち時間短縮,お客様の異常(ふらつきや設備・窓口の迷いなど)検知,導入した設備の効果測定 |
| 商業施設 | 人流基礎データの蓄積と周期性や長期傾向の把握,デジタルサイネージとの連携,異常(不審者,事故,パニックなど)検知 |
| 百貨店・小売店舗 | お客様の動線の最適化,効果的を上げるためのスタッフの行動分析,店内レイアウトや商品陳列位置の違いによる動線変化や売上変化の効果測定,不審行動(万引き)の検出やスタッフ声かけへの連携 |
| 施設一般 | セキュリティ(侵入検知や設備と連動した事故防止・安全管理),什器・設備位置や通路のレイアウト変更の影響や設備利用効率の測定,不審行動(迷子,迷い等の不自然な動き)の検出やスタッフ声かけへの連携 |
| リハビリや施設向け | 特徴的な歩容やふらつき・移動速度からの各種スクリーニング,徘徊や事故・転倒検出 |
主な特徴
- 計測には"eye safe laser"出力の安全な赤外線レーザーを使用
- 計測場所にセンサを設置して手軽に計測が開始可能
- 計測対象に無線タグなどを持たせる必要がない
- 匿名性の確保.個人情報やプライバシーに配慮する必要のある場所で使用可能
- 高精度(センサから20mで誤差5cm以下のセンサを使用),リアルタイム処理(最高40fps)
- 屋内外で使用可能.悪天候,オイルミスト下等のほかカメラが苦手な明暗所でも使用可能
- 統計モデルを用いた処理.レーザが遮られても位置を予測
- 外部プログラム連携
- 複数センサ連動による計測エリアの拡張
- 予算や用途に合わせたセンサ選択
- 車椅子利用の要介護者や介護者,乳児を抱っこしている大人なども識別する高精度カウントおよび各種属性取得(特許技術)
使用の流れ
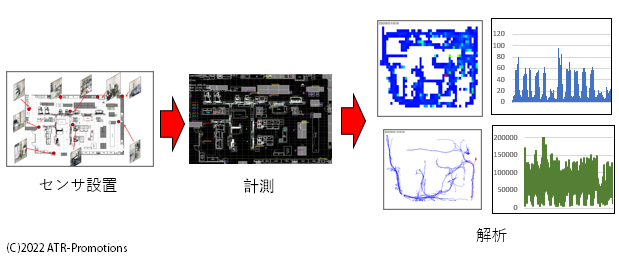
計測エリアの面積やレイアウトおよび計測目的に応じてセンサ機種や個数および配置を決定します.そして人流の周期性なども考慮した上で十分なデータが得られる期間計測を行い,得られたデータを目的に応じた手法で解析を行います.何らかの効果測定を行う場合は改善前後の比較を行うことが好ましいほか,リアルタイムでフィードバックが必要な場合はネットワーク経由で外部プログラムに連携させてください.
ATRackerはセンサ制御用プログラム(「LRFController」など),人位置計測(人流計測)プログラム(「HumanTracker」など),そして周辺ツールがセットになったパッケージです.お客様のご要望に応じた形態での販売・サービス提供が可能です.パッケージソフトとして販売可能なほか,センサを含めたレンタル,位置・トラッキング情報を用いた各種処理を行うアプリケーション開発,データの解析やコンサルなどお気軽にご相談ください.
HumanTrackerについて
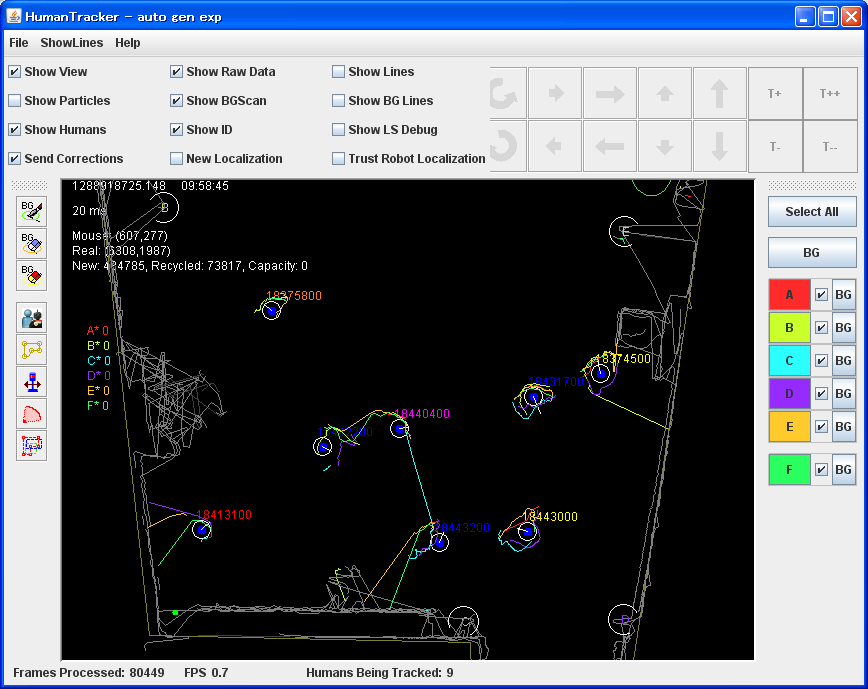
人位置計測ソフトウエア「HumanTracker」はエリア内に設置した複数のLRFのキャリブレーションを行ったり,検出した人の位置(座標)や進行方向・速度等を算出して出力したりする機能を持ちます.
左図では検出した人の位置を青色の丸で表示しています.トラッキング中の人についているIDはその人を検出した時刻を元にしたIDであり,ソフト上の操作またはネットワーク経由で外部システムから固有のタグを付加することも出来ます.処理負荷は非常に軽く,一般的なオフィス面積の処理であればミドルクラスのノート型PCで問題ありません(対応OS:Windows 10,11).
「HumanTracker」が出力するパラメータ
1回の処理(最大40fps)毎に1ラインのデータとして以下パラメータをCSVファイルとして出力したり,ネットワーク経由(TCP/IP ソケット通信)でリアルタイム出力することが出来ます.お客様の開発されたプログラムと連携してリアルタイム処理を行う場合は,ネットワーク経由でデータを得るようにして下さい.
- ・分析時刻
- ・トラッキング中の人数
- ・各トラッキング対象(人)の情報
- ・トラッキングID
- ・X,Y座標位置[mm]
- ・移動速度[mm/s]
- ・移動方向
- ・向いている方向(推定)
- ・追加属性タグ
センサおよびその設置について
センサはご予算や計測用途等により適切な機種・台数等を提案させて頂きます.設置や撤収の容易さが重要な場合は三脚やポールを使用して設置し,長期間常設的に使用する場合等は天井などに治具を用いて固定します.

事例紹介(病院内検査室の動線調査)
調査の概要
事例紹介の詳細表示
計測の様子
以下の動画は実際に計測したデータから再現した検査室内の様子です.設置された機器や什器の背景画像に技師の位置を○で表示しています.なお,動画では途中から再生速度を上げてているため,早送りになっています.
ヒートマップによる滞留傾向の把握
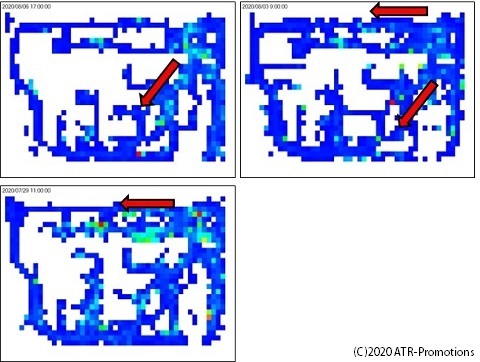
移動したいのにスムーズに移動出来ないという状況や,目的の機器や場所の前に発生する行列や「待ち」を意味する滞留はを端的に示すことが出来るヒートマップは,スムーズに人が流れているかを俯瞰する上でとても有効です.また,滞留傾向が時間帯や曜日,その他季節によって異なる傾向を持つ場合があります.そのため面積や時間分割の粒度も考慮し,得られたデータが普遍的なデータとして解釈して良いかや周期性を持っていないか等も検討しました.
移動軌跡による動線の確認
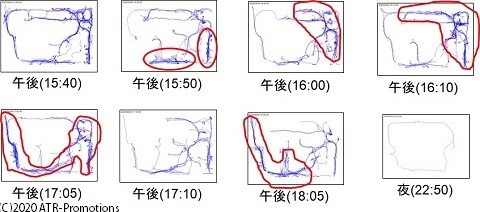
こちらに示した図からは時間帯によって検査内容に偏り等があり,その結果移動軌跡のパターンが大きく異なっていることが示されています.そのため,個別の検査内容を考慮した動線の最適化を行う必要があることが示唆されています.
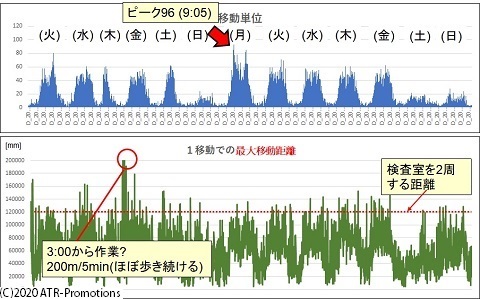
移動頻度や1移動あたりの移動距離
1移動あたりの移動速度
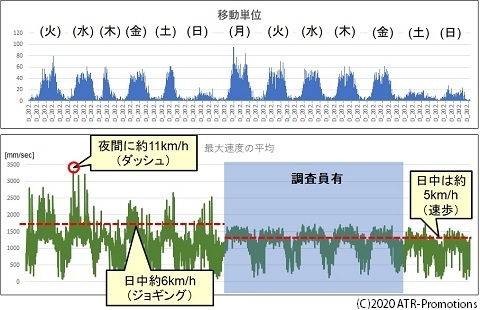
左の図はのべ移動頻度と1移動あたりの最大速度を示したものです.夜間は特に忙しくダッシュで移動するケースが見られました.また調査の途中までは日中でもジョギング以上の速度での移動が頻発していました.しかし行動分析のためにメーカーの調査員が検査室内に立って調査を開始したと同時に走る人が目に見えて減り,概ね最高でも速歩の速度になりました.そして「走らなくても十分に業務が回る」という共通認識が得られたためか,調査員による調査が終了した後もこの変化は持続しました.そしてこの状況をATRackerは記録し続けていました.
補足
なお上記内容は調査内容のごく一部です.実際にはより緻密な分析や状況確認,関係者へのヒアリング等も行い,総合的なデータ解釈を行っています.
元となった研究について
ATRackerは総務省委託研究「ネットワーク・ヒューマン・インターフェイスの総合的な研究開発(ネットワークロボット技術)」(2006年~)や「ユビキタスマーケットの実証」において行われた株式会社国際電気通信基礎技術研究所(ATR) 知能ロボティクス研究所(現:DIL深層インタラクション総合研究所)の研究成果を元にしています.「ユビキタスマーケットの実証(2011)」紹介動画
「大阪南港のイベント・ショッピングモールATC」で行った人流計測の様子(2012)
大阪のショッピングモールであるATCの900㎡の範囲の人流計測の様子です.当時はセンサとしてkinectやD-Imagerを中心に使用していました.
弊社OpenHouse 2014での人流計測の様子
約50m×8mの範囲を5個のLRFで計測.お客様のブースでの滞在時間や,どのブースを見たお客様がどのブースも見るか等の解析を行いました.


![]()